Des robots modulaires reconfigurables en un temps record
De multiples petits robots communiquant entre eux peuvent s'auto organiser pour construire un objet de forme déterminée. Mais ce processus est très lent. Des chercheurs de l'institut FEMTO-ST ont trouvé une méthode pour l'accélérer. Leurs résultats seront présentés à la conférence AAMAS (International Conference on Autonomous Agents and Multiagent Systems) qui aura lieu du 13 au 17 mai 2019 à Montréal.
Comment construire un objet 3D à l'aide de petits modules qui s'auto assemblent pour réaliser une forme donnée ? Tel est le défi que se posent les chercheurs qui étudient des réseaux de micro robots capables d'échanger des messages et de se déplacer de manière coordonnée pour former une structure 3D. Un processus de reconfiguration complexe, et très lent en raison du nombre limité de modules qui peuvent se déplacer en même temps sans interférer. Une équipe de l'institut FEMTO-ST (CNRS/université de Franche-Comté) a mis au point une méthode pour accélérer cette reconfiguration.
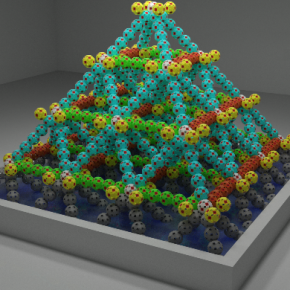
L'étude a été menée à l'aide d'un logiciel de simulation de robots modulaires. Chaque module, de forme quasi sphérique, se déplace en roulant sur la surface de ses voisins, et peut se connecter à 12 d'entre eux. Pour accélérer la construction de l'objet 3D, le principe était de favoriser les déplacements simultanés de modules (le parallélisme de la reconfiguration), et de simplifier leur coordination.
Les chercheurs ont d'abord fait le choix de construire des objets sous la forme d'une structure d'échafaudage, et non d'un solide massif, ce qui facilite la mobilité des modules pendant la construction. Ils ont par ailleurs développé des algorithmes distribués aussi simples que possible, tout en garantissant que le système atteindra bien la forme visée. Pour éviter les blocages pendant la reconfiguration, un petit nombre de règles simples, identiques, ont été implantées dans chaque robot.
Les algorithmes ont été testés avec le logiciel de simulation, en faisant construire des pyramides de différentes tailles par les petits robots. Ces expérimentations ont montré que le temps nécessaire à la construction variait comme N2/3, N étant le nombre de modules utilisés. Ce qui veut dire que la méthode reste viable même si N devient très grand, l'objectif étant d'utiliser des centaines de milliers, voire des millions de robots élémentaires.
L'équipe de FEMTO-ST continue à améliorer ses algorithmes, et espère accélérer encore le processus pour atteindre un temps de reconfiguration qui varie comme N1/3. Cette approche doit aussi être généralisée, afin de construire d'autres formes. Parmi les applications potentielles de cette "matière programmable"1 : la fabrication d'objets prototype pour accélérer le design de pièces conçues en CAO, ou encore la réalisation de maquettes interactives d'organes, permettant au chirurgien de tester une opération avant de la réaliser.
- 1FEMTO-ST coordonne par ailleurs deux projets sur ce thème : le projet ANR "ProgrammableMatter", mené avec le Limms (Laboratory of Integrated Micro Mechatronic Systems, laboratoire international mixte entre le CNRS et l’Université de Tokyo), et le groupe PSA ; le projet ISITE-BFC « Building the basic blocks for programmable matter” mené avec le LIB (Laboratoire d’informatique de Bourgogne), le groupe PSA et Techpower Electronics.
Pour aller plus loin :
There are many ways to implement programmable matter. One is to build it as a huge modular self-reconfigurable robot composed of a large set of spherical micro-robots, like in the Claytronics project. These micro-robots must be able to stick to each other and move around each other. However, the shape of these micro-robots has not been studied yet and remains a difficult problem as there are numerous constraints to respect. We propose a quasi-spherical structure for these micro-robots, which answers all the constraints for building programmable matter, helping the realization of an interactive computer-aided design (CAD) framework. We study different scenarios, validate the ability to move and propose methods for manufacturing these micro-robots.
Audiodescription
Pour en savoir plus :
- Plus d'infos sur la conférence AAMAS (du 13 au 17 mai 2019 à Montréal).