ThermoBot : la microrobotique à fleur d’eau
La surface de l’eau n’est plus réservée à quelques insectes, des systèmes robotiques commencent aussi à l’explorer. Des scientifiques de l’institut FEMTO-ST et de l’École polytechnique de Bruxelles ont ainsi conçu ThermoBot, une plateforme qui permet de déplacer très précisément, grâce à un laser, des objets microscopiques disposés à l’interface entre l’eau et l’air. Ces travaux offrent une approche originale pour une microrobotique sans contact.
Dans les cieux, au sol ou sous l’eau, les robots miniatures conquièrent toutes sortes d’environnements. La surface de l’eau, à l’interface avec l’air, reste cependant un milieu encore peu exploré par de petites machines. Divers insectes y parviennent naturellement grâce à la tension de surface, un phénomène différent de la flottaison : leur poids est réparti d’une telle manière qu’ils ne transpercent pas la surface de l’eau. Des chercheurs et chercheuses de l’institut FEMTO-ST (CNRS/COMUE UBFC) et de l’École polytechnique de Bruxelles se sont inspirés du phénomène pour concevoir une plateforme de microrobotique, appelée ThermoBot, qui permet de déplacer de tout petits objets à l’interface entre l’air et l’eau. Ces travaux sont publiés dans la revue Science Robotics.
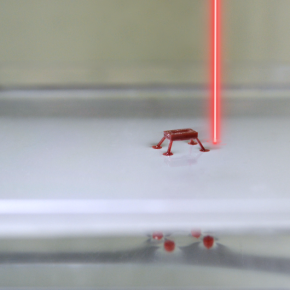
Le système est basé sur le principe de la thermocapillarité. Concrètement, un laser balaie la surface de l’eau où sont disposées différentes formes en 3D, d’une taille allant de 400 micromètres à un centimètre de long. Certains sont de simples billes, d’autres possèdent quatre pattes. Quand le laser chauffe le liquide, il modifie sa tension de surface et génère des courants de convexion. S’il pointe devant un des objets, celui-ci va être poussé avec une maîtrise très fine de son déplacement. Un système de miroir contrôle en effet la trajectoire du laser au point qu’il dirige un objet d’un centimètre avec une précision d’un millimètre, permettant par exemple d’assembler des pièces de puzzle miniature. Certains objets se déplacent à des vitesses très importantes à leur échelle : jusqu’à vingt fois leur taille par seconde, soit l’équivalent de 200 km/h, et avec une précision de 50 centimètres, pour une voiture moyenne. Les applications de ThermoBot restent à être inventées, l’équipe suggère que leur plateforme de microrobotique sans contact pourrait servir à convoyer et agencer des composants miniaturisés.
Rush de recherche | ThermoBot : la microrobotique à fleur d’eau
Audiodescription
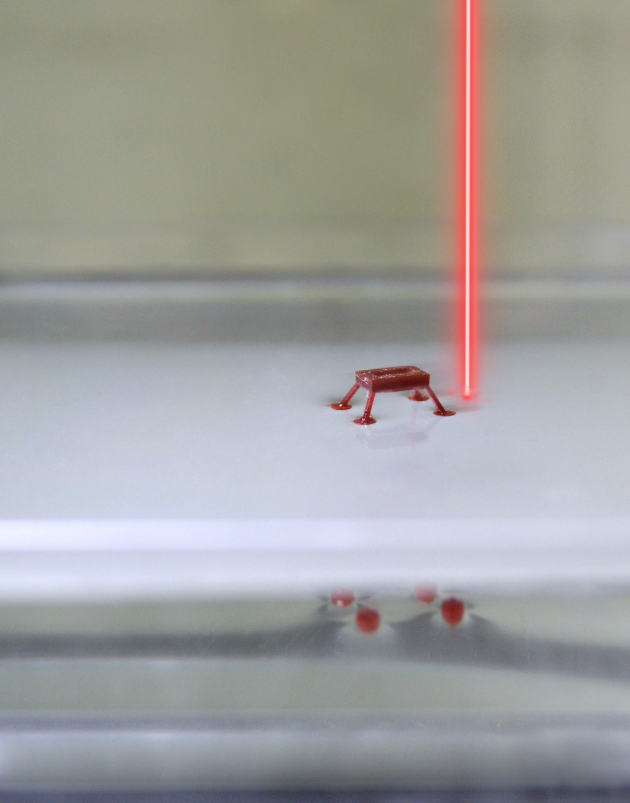
© Piñan Basualdo et al.
Références
A microrobotic platform actuated by thermocapillary flows for manipulation at the air-water interface. Franco N. Piñan Basualdo, A. Bolopion, M. Gauthier, P. Lambert.
Science Robotics, 2021.
DOI: 10.1126/scirobotics.abd3557
Pour en savoir plus :
Découvrez le portrait d'Aude Bolopion, médaille de bronze du CNRS 2019